
ASÍ ES NUESTRO PROYECTO
Componentes:
1. Los primeros días pensamos que eran necesarios pocos componentes como: el plástico para hacer la base, la torre y el brazo que sujetarían el láser y los servos, importantes para el movimiento.
2. Después descubrimos que algunas medidas eran incorrectas por lo que tuvimos que improvisar una base de cartón.
3. Al final volveremos a la idea del plástico con unas mejores medidas y cambio en la base.


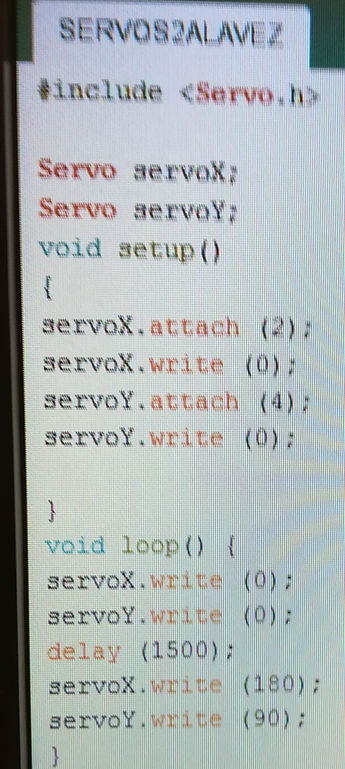
Programación:
Esta programación sirve para mover dos servos a la vez , con un intervalo de 1,5 segundos.
El servo X: está en la base de manera horizontal y eso hará que la base gire 180 grados.
El servo Y: está la torre que moverá el brazo del láser (de forma continua ) .
El servo X tiene que estar conectado con la placa base del puerto 2, y el servo Y en el puerto 4.
Base:
Debido a que la base tiene que medir máximo
20 cm al principio tuvimos algunos problemas, pero lo solucionamos y conseguimos dejar el diseño final en 8 centímetros.
Esta es nuestra base, dentro irá nuestro servo. Y hará movimientos horizontales.

Modificaciones:
1. Nuestras primeras ideas fueron bastantes básicas, ya que creíamos que constaría solo de dos partes: brazo y base. Sobre la programación teníamos pensado solo en un simple movimiento vertical y horizontal con dos servos, que conseguiremos buscando información.
2. Después pensamos en cómo dividir la base y el brazo.Añadimos una pequeña torre para aumentar el grado de giro que podían hacer nuestros servos.
3. Lo siguiente que tenemos pensado para mejorar el brazo es acortar el tamaño del soporte del láser para disminuir el peso; lo que dará una mejor precisión en los movimientos de los servos,
también tenemos pensado cambiar el encaje del servo mediante una hélice, y simplemente hacer un agujero pequeño para insertarlo sin la hélice.
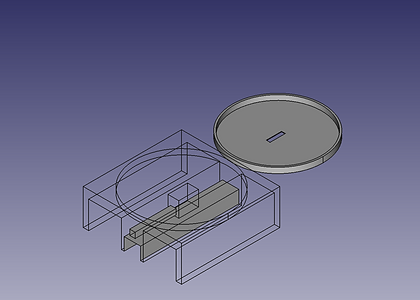
Diseño final de la base